第2课 我的小车更灵活 教学设计 2023-2024学年九年级下册信息技术
2023-11-01 13:27:30 学考宝 作者:佚名
Word文档版
学考宝(xuekaobao.com)友情提示:html格式不完整,如有需要请根据文末提示下载并进行二次校对Word文档。
我的小车更灵活
本课的教学目标是让学生利用差速转向原理实现机器人左转和右转任务,根据任务描述要求发散思维,体验创意机器人、飞行机器人的搭建和控制,并完成左转和右转任务。可以搭建飞行机器人,并根据小组合作探究完成巩固提升内容。
一、教学目标
1.了解机器人差速转向的原理。
2.学会控制机器人的左转和右转。
3.体验创意机器人、飞行机器人的搭建和控制。
二、教学重难点分析
1.教学重点:了解机器人差速转向的原理,学会控制机器人的左转和右转。
2.教学难点:体验创意机器人、飞行机器人的搭建和控制。
三、教学准备
1.教学环境
(1)软件环境:多媒体网络教学软件、Windows7操作系统、虚拟机器人软件。
(2)硬件环境:网络状态稳定的计算机教室。
2.教学资源
四驱玩具车、教学课件、“我的小车更灵活”任务、微视频。
四、教学建议
(一)差速转向探秘
车辆通过控制左右两个驱动轮的转速实现转向。驱动轮转速不同时,即使无转向轮或者转向轮不动作,车身也会旋转。本节课我们便是采用差速转向的原理实现小车的转向。为了加深学生的理解,建议教师准备一辆四驱玩具车,或准备相关微视频,让学生观看,并总结出差速转向的规律:当左右轮子的速度与方向均相同时,小车前进或后退;当左右轮子一侧轮子不动,另一侧轮子转动时小车以不动轮为轴,左转或右转;当左右轮子方向相同但速度不同时,小车的行驶方向会偏向速度慢的一侧,即左转或右转;当左右轮子的速度相同而方向相反时,小车原地转圈。对转向原理的理解能为小车左右转编程打下理论基础。
探究实践一“我的小车更灵活_左转”机器人的搭建,左转和右转机器人的结构和第一课的机器人结构完全一样,因此这里只要另存第一课的机器人即可。实际教学中,教师也可以让学生通过资源管理器直接将机器人导入到平台中使用。操作步骤如下:
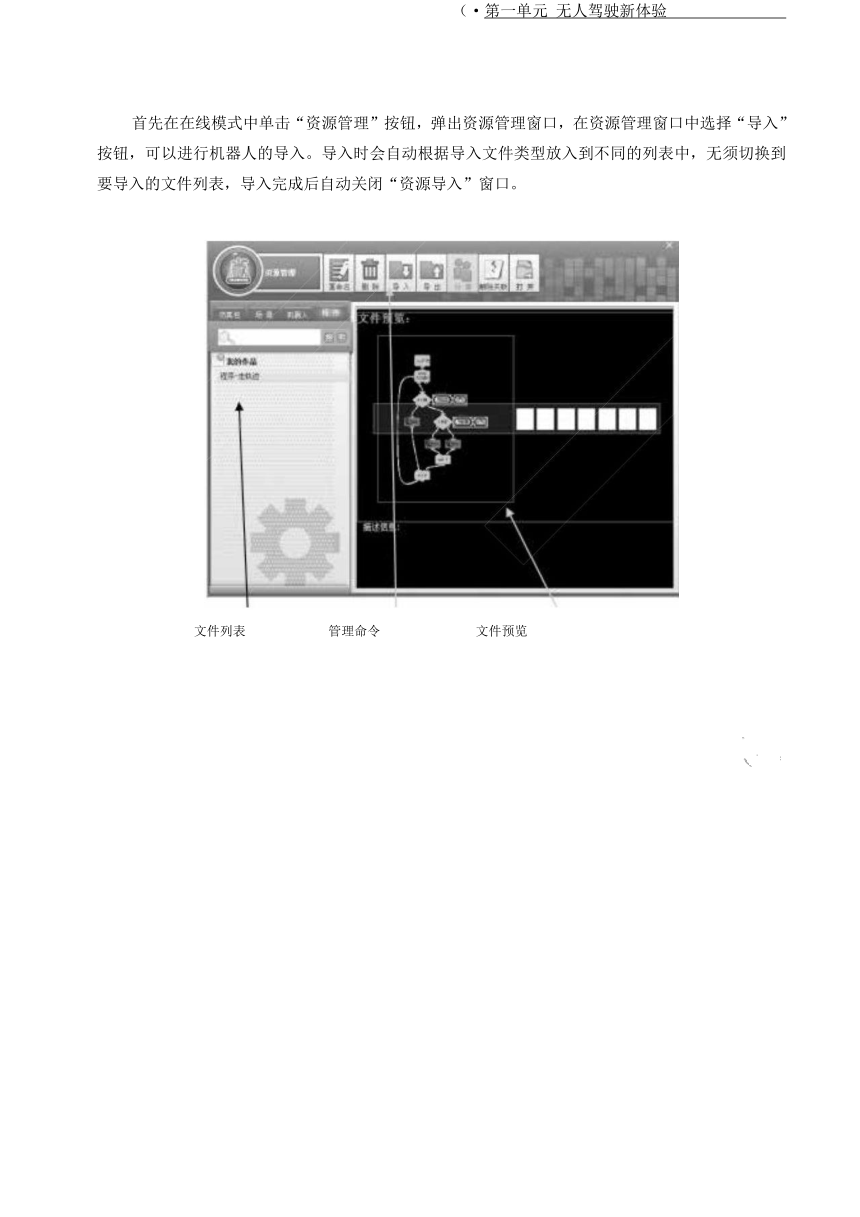
首先在在线模式中单击“资源管理”按钮,弹出资源管理窗口,在资源管理窗口中选择“导入”按钮,可以进行机器人的导入。导入时会自动根据导入文件类型放入到不同的列表中,无须切换到要导入的文件列表,导入完成后自动关闭“资源导入”窗口。
(·第一单元 无人驾驶新体验
文件列表 管理命令 文件预览
不同类型的文件有不同的图标和扩展名。
iqprobot
iqpvpl
在机器人左转任务中,用到了复制粘贴命令,可以大大提高编程的效率。复制模块的步骤如下:
1.单击选择要复制的模块(按住Ctrl键可多选)。
2.单击“操作”>“复制”,或者按下键盘“ 键进行复制。
粘贴已复制的模块过程如下:
1.单击“操作”>“粘贴”,或者按下键盘“键进行粘贴。
2.鼠标在编辑区的空闲位置单击,复制的模块被粘贴到单击处最近的网格位置。复制粘贴完成后,需要修改各模块的参数值,再通过拖拉操作将模块连接起来。
(二)机器人搭建进阶
仿真平台采用三维坐标系统,分别用红、绿、蓝色线条表示X、Y、Z轴的正方向,XZ平面为水平面。若要进行机器人的全方位观看,可以通过视角面板进行调节,它可以完成视角的环绕、缩放、平移等操作,能让学生从各个角度查看编辑区的视角。
有了坐标体系和视角操作的基础,在“小试身手”部分教师可以鼓励学生尝试更多种类的机器人搭建,并完成右转任务,如课本中提到的创意三轮车机器人和四轮飞碟机器人,让学生探索问题解决的多种策略。
(三)别拦我,让我飞
“机器人搭建进阶”中的解决问题的多种路径都是在地面上进行的,那我们可不可以尝试让机器人飞起来呢?飞行器的升空是通过飞行器的倾斜角来控制的,倾斜角又是通过螺旋桨的速度差控制的。了解了基本原理后,其搭建和编程就比较简单了。这里可以采取小组合作探究的方式,先尝试如何让飞行器飞起来,再尝试控制其方向。
(四)巩固提升
前进程序及程序中的多直流电机的属性设置如下图所示,其中延时为1000ms。
前进程序
后退程序及程序中的多直流电机的属性设置如下图所示,其中延时为1000ms。
后退程序
后退程序多直流电机属性
向右转程序及程序中的多直流电机的属性设置如下图所示,其中延时为3200ms。
向右转程序
向右转程序多直流电机属性
五、教学评价设计
本节课的重点是让学生学会控制机器人的左转和右转。SOLO分类评价理论的使用必须以教学目标为依据,本着对发展学生个性和创造精神有利的原则进行。本课的评价可以参照以下几个方面:
1.是否能够实现四轮简单机器人的右转程序编写;
2.是否能够发挥想象力、搭建创意机器人,并根据上课所学知识进行迁移,完成创意机器人的左转与右转;
3.有没有完成提升练习,是否可以让飞行机器人顺利起飞,并完成前进后退和右转任务。
图片资源预览